To connect the vertices in the graph to the heap, maintain an int array called map. This array contains a slot for each vertex in the graph. If a vertex with index i is in the heap, then map[i] contains the slot in the heap that i is in. If a vertex with index i is not in the heap, then map[i] contains -1. Recall that at any time during the running of the DSP algorithm, the vertices in V - S need to be stored in the heap. As the heap changes, map will also have to be updated. However, the updates to map only add a constant overhead to the running time of the heap operations.
Here are some specifics. Start with Lafore's heap class and modify it into a min-heap. Then add an integer array called map as a data member to this class. Each element that is inserted into the heap comes with two descriptors: a key and a priority. In the case of our application (the DSP algorithm) we insert vertices into the heap and these are decribed by an index (the key) and a d-value (the priority). Also, the DSP algorithm repeatedly calls the change function in the heap class. The change function in the heap class currently takes an index that points to a slot in heapArray. However, for the DSP algorithm, we need a change function that takes as index that points to a slot in map.
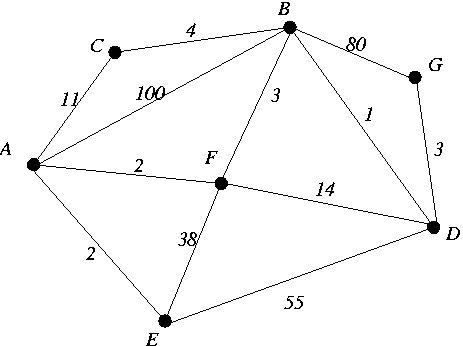
After implementing the DSP algorithm, run it on the graph shown in Problem 1 and make sure that it computes a correct shortest path tree.